영상의 기하학적 변환
Table of contents
- 영상의 기하학적 변환(Geometric transformation)
- 이동 변환(Translation trnaform)
- 전단 변환(Shear transform)
- 크기 변환(Scale transform)
- 보간법
- 회전 변환(Rotation transform)
- 기하학적 변환
- 어파인 변환(Affine transform)
- 투시 변환(Perspective tranform)
- 리맵핑(Remapping)
영상의 기하학적 변환(Geometric transformation)
영상을 구선하는 픽셀의 구조를 변경함으로써 전체 영상의 모양을 바꾸는 작업이다. 전처리, 영상 접합, 왜곡 제거 등이 이에 해당한다.
영상의 변환 방법은 크게 두 가지로 나눠진다. 첫 번째로 원본 영상의 직선 형태를 변환 후에도 직선으로 유지하는 형태의 변환이다. 두 번째는 원본 영상의 직선 형태를 곡선 형태로 변환하는 혹은 그 반대인 변환 방법들이 존재한다.
이동 변환(Translation trnaform)
이동 변환은 영상의 가로 또는 세로 방향으로 영상을 특정 크기만큼 이동시키는 변환 방법이다.
좌표를 이용하여 식으로 표현하면 다음과 같다. \(\begin{cases} x`=x+a\\ y`=y+b \end{cases} \\\)
원점이 (0,0)에서 (a,b)로 이동했기 때문에 영상 전체의 픽셀이 마찬가지로 원래 위치에서 (a, b)만큼 증가하는 형태가 되어야 한다.
\(\begin{bmatrix}
x`\\
y`
\end{bmatrix} =\begin{bmatrix}
1 & 0\\
0 & 1
\end{bmatrix}\begin{bmatrix}
x\\
y
\end{bmatrix} +\begin{bmatrix}
a\\
b
\end{bmatrix}
\\\)
위와 같이 행렬로 표현이 가능하며
\(\begin{bmatrix}
x`\\
y`
\end{bmatrix} =\begin{bmatrix}
1 & 0 & a\\
0 & 1 & b
\end{bmatrix}\begin{bmatrix}
x\\
y\\
1
\end{bmatrix}\)
행렬 연산 과정에서 덧셈이 포함되는 경우 식의 전개가 복잡해진다. 때문에 위 식처럼 덧셈 부분을 업애기 위해 곱셈 부분에 하나의 차원을 늘릴 수 있다. 이러한 좌표계를 동차좌표계(Homogeneous Coordinate)라고 한다.
void ex_translate(){
Mat src = imread("../data/lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
Mat dst = Mat::zeros(src.size(), CV_8UC1);
for (int y = 0; y < src.rows; y++) {
for (int x = 0; x < src.cols; x++) {
int x_ = x + 100;
int y_ = y + 100;
if (x_ < 0 || x_ >= dst.cols) continue;
if (y_ < 0 || y_ >= dst.rows) continue;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void ex_processing(){
Mat src = imread("../data/lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
float data[] = {1, 0, 100, 0, 1, 100};
Mat affine = Mat(2,3, CV_32FC1, data);
// or
// Mat affine = (Mat_<float>(2, 3) << 1, 0, 100, 0, 1, 100);
Mat dst;
warpAffine(src, dst, affine, Size());
imshow("src", src);
imshow("dst", dst);
waitKey();
}
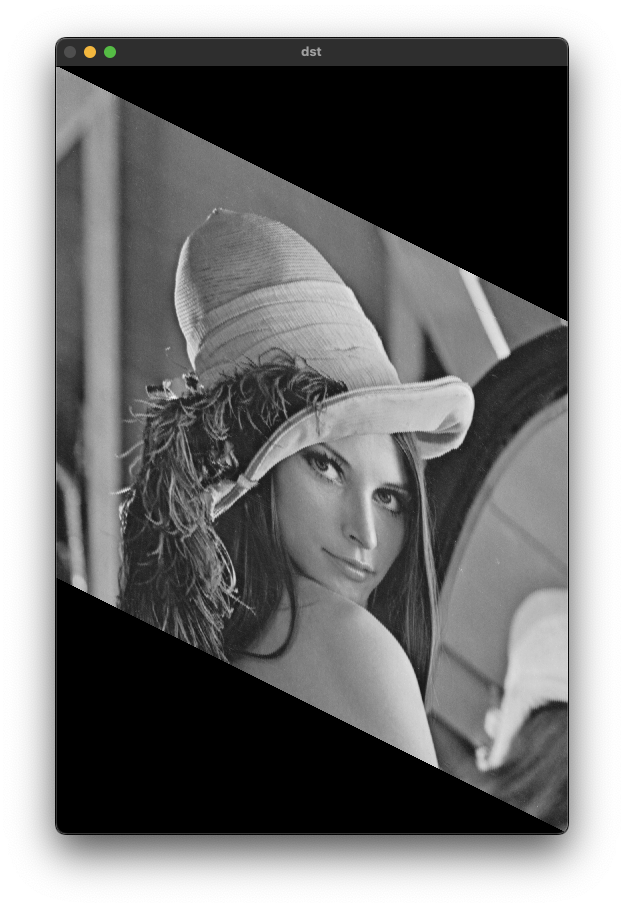
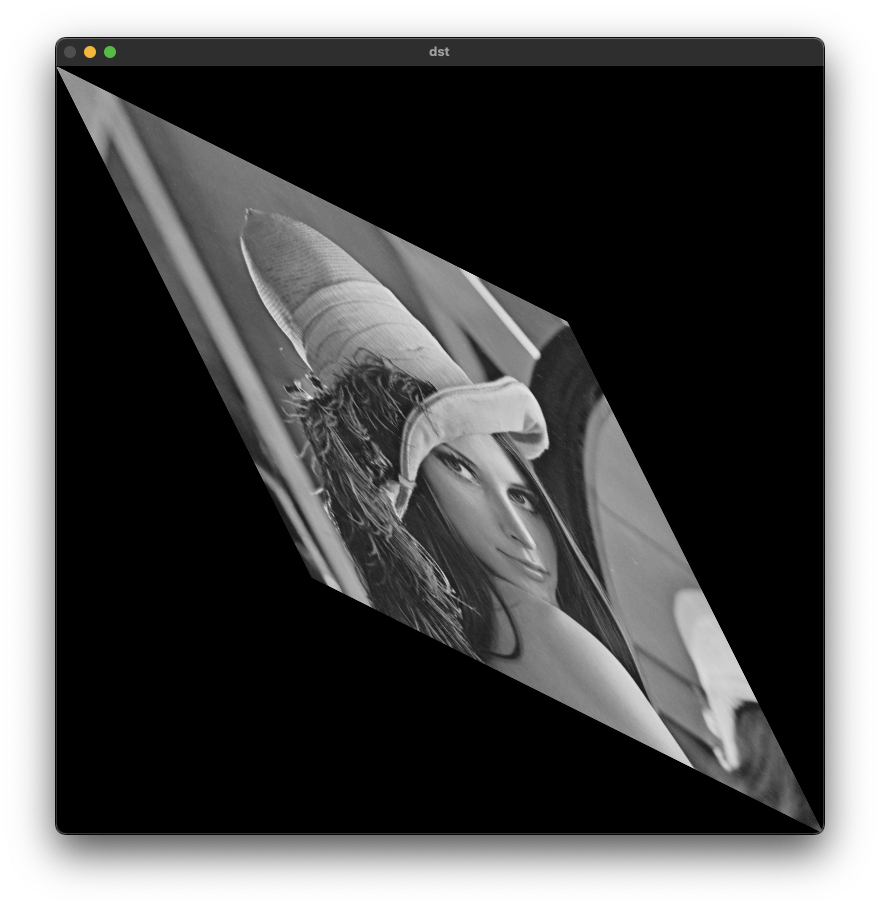
전단 변환(Shear transform)
층밀림 변환이라고 하며, 직사각형 형태의 영상 데이터를 한쪽 방햫 혹은 양쪽 방향을 밀어서 평행사변형 모양으로 변환하는 방법이다.
\[\begin{bmatrix} x`\\ y` \end{bmatrix} =\begin{bmatrix} 1 & m_{y} & 0\\ m_{x} & 1 & 0 \end{bmatrix}\begin{bmatrix} x\\ y\\ 1 \end{bmatrix}\]void ex_processing(){
Mat src = imread("../data/lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
Mat dst(src.rows * 3 / 2, src.cols, src.type(), Scalar(0));
double m = 0.5;
for (int y = 0; y < src.rows; y++) {
for (int x = 0; x < src.cols; x++) {
int nx = x;
int ny = int(y + m*x);
dst.at<uchar>(ny, nx) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void ex_processing(){
Mat src = imread("../data/lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
float data[] = {1, 0.5, 0, 0, 1, 0};
Mat affine = Mat(2,3, CV_32FC1, data);
// or
// Mat affine = (Mat_<float>(2, 3) << 1, 0.5, 0, 0, 1, 0);
Mat dst;
warpAffine(src, dst, affine, Size(src.cols * 3 / 2, src.rows));
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void ex_processing(){
Mat src = imread("../data/lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
float data[] = {1, 0.5, 0,
0.5, 1, 0};
Mat affine = Mat(2,3, CV_32FC1, data);
Mat dst;
warpAffine(src, dst, affine, Size(src.cols * 1.5, src.rows * 1.5));
s
imshow("src", src);
imshow("dst", dst);
waitKey();
}
크기 변환(Scale transform)
영상의 크기를 변환하는 방법이다. 스케일 비율에 따라 크기를 조절한다.
\[\begin{bmatrix} x`\\ y` \end{bmatrix} =\begin{bmatrix} s_{x} & 0 & 0\\ 0 & s_{y} & 0 \end{bmatrix}\begin{bmatrix} x\\ y\\ 1 \end{bmatrix}\]순방향 맵핑(Forward mapping)
for loop를 이용한 이미지 확대 방법을 이용해서 영상의 크기를 2배 확대하는 경우 빈 공간이 생기는것을 확인할 수 있다. 입력 영상의 좌표를 2배하여 출력 영상의 값으로 사용하기 때문이다.
\[\begin{cases} x`=s_{x} x\\ y`=s_{y} y \end{cases}\]void ex_processing(){
Mat src = imread("../data/lenna.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, CV_8UC1);
for (int y = 0; y < src.rows; y++) {
for (int x = 0; x < src.cols; x++) {
int x_ = x * 2;
int y_ = y * 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
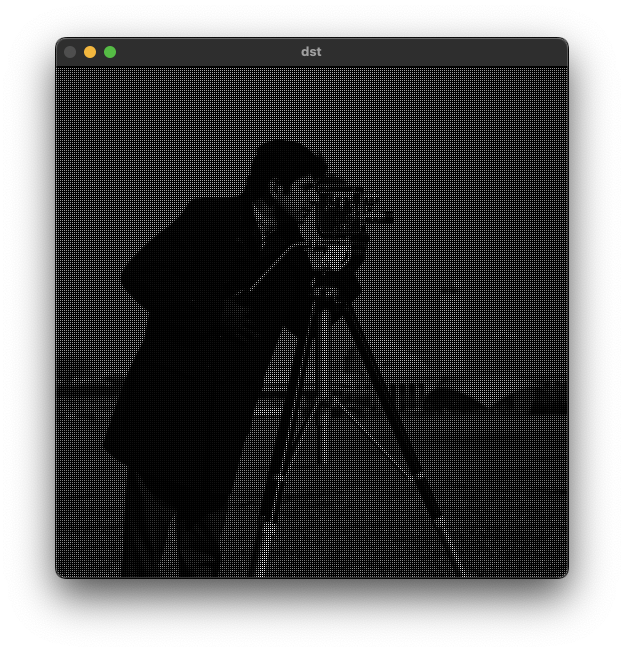
역방향 맵핑(Backward mapping)
역방향 맵핑을 통해 순방향 맵핑에서 나타나는 문제를 해결할 수 있다. 출력 영상의 좌표를 기준으로 스케일 팩터(s)를 나눈 원본 영상의 위치의 픽셀값을 가져온다. 하지만 역방향 맵핑의 경우 원본 영상에서 중복된 픽셀을 가져오기 때문에 계산 현상이 심한것을 확인할 수 있다.
\[\begin{cases} x= x`/s_{x}\\ y=y`/s_{y} \end{cases}\]void ex_processing(){
Mat src = imread("../data/camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, src.type());
for (int y_ = 0; y_ < dst.rows; y_++) {
for (int x_ = 0; x_ < dst.cols; x_++) {
int x = x_ / 2;
int y = y_ / 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
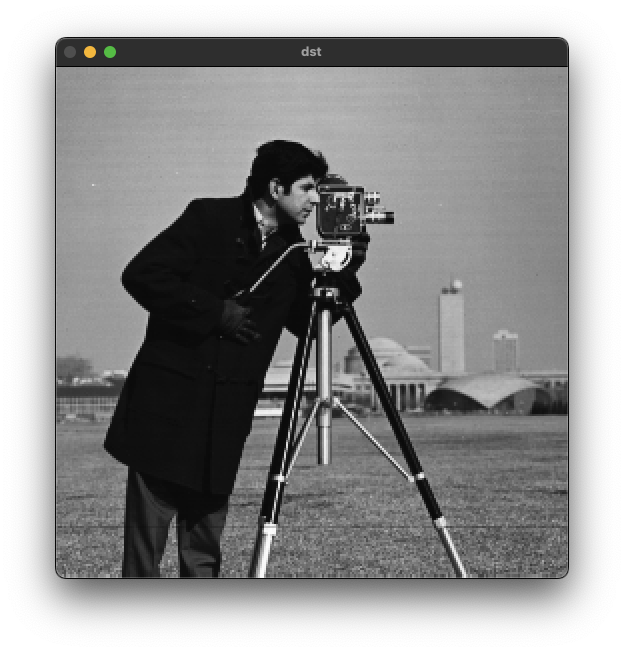

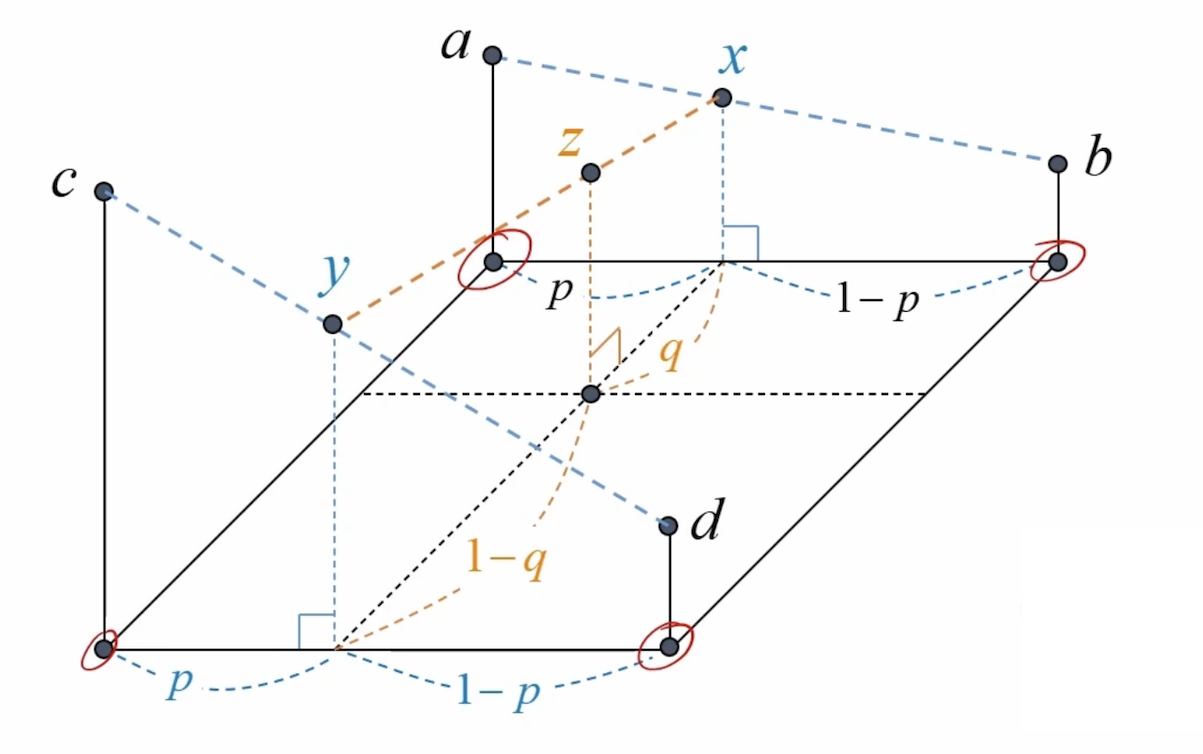
보간법
\(\begin{align*}
x & =( 1-p) a+pb\\
y & =( 1-p) d+pc\\
z & =( 1-p) y+px\\
z & = ( 1-q)[( 1-p) d+pc] +q[( 1-p) a+pb]\\
& = ( 1-p)( 1-q) d+( 1-q) pc+( 1-p) qa+pqb
\end{align*}\)
void resizeBilinear(const Mat& src, Mat& dst, Size size)
{
dst.create(size.height, size.width, CV_8U);
int x1, y1, x2, y2; double rx, ry, p, q, value;
double sx = static_cast<double>(src.cols - 1) / (dst.cols - 1);
double sy = static_cast<double>(src.rows - 1) / (dst.rows - 1);
for (int y = 0; y < dst.rows; y++) {
for (int x = 0; x < dst.cols; x++) {
rx = sx * x; ry = sy * y;
x1 = cvFloor(rx); y1 = cvFloor(ry);
x2 = x1 + 1; if (x2 == src.cols) x2 = src.cols - 1;
y2 = y1 + 1; if (y2 == src.rows) y2 = src.rows - 1;
p = rx - x1; q = ry - y1;
value = (1. - p) * (1. - q) * src.at<uchar>(y1, x1)
+ p * (1. - q) * src.at<uchar>(y1, x2)
+ (1. - p) * q * src.at<uchar>(y2, x1)
+ p * q * src.at<uchar>(y2, x2);
dst.at<uchar>(y, x) = static_cast<uchar>(value + .5);
}
}
}
Mat src = imread("../data/camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
Mat dst;
resizeBilinear(src, dst, Size(1200, 1200));
imshow("src", src);
imshow("dst", dst);
waitKey();
resize() 함수를 이용한 사이즈 변환
void ex_processing(){
Mat src = imread("../data/rose.bmp");
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
Mat dst1, dst2, dst3, dst4;
resize(src, dst1, Size(), 4, 4, INTER_NEAREST);
resize(src, dst2, Size(1920, 1280));
resize(src, dst3, Size(1920, 1280), 0, 0, INTER_CUBIC);
resize(src, dst4, Size(1920, 1280), 0, 0, INTER_LANCZOS4);
imshow("src", src);
imshow("dst1", dst1(Rect(400, 500, 400, 400)));
imshow("dst2", dst2(Rect(400, 500, 400, 400)));
imshow("dst3", dst3(Rect(400, 500, 400, 400)));
imshow("dst4", dst4(Rect(400, 500, 400, 400)));
waitKey();
}
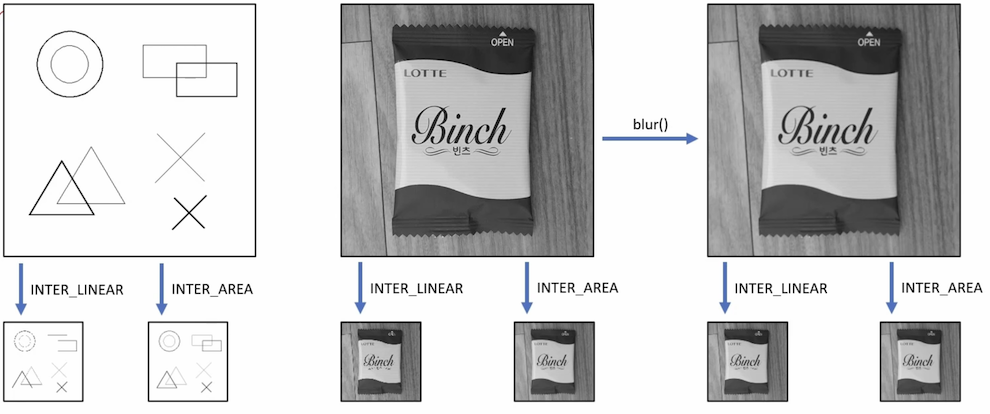
영상 데이터 축소 시 주의할 점
영상을 축소하는 것은 확대하는 것보다 단순하게 생각할 수 있지만 원본 영상을 급격하게 축소시키는 경우 열화 현상에 의해 화질이 나빠질 수 있다. 원본 영상에 blur 처리를 한 후 영상을 축소하거나, INTER_AREA 라는 옵션을 이용하면 된다.
회전 변환(Rotation transform)
영상을 특정 각도만큼 회전시키는 변환 방법이다. OpenCV에서는 기본적으로 반시계 방향을 정방향으로 정의한다.
정방향 맵핑(Forward mapping)
\(\begin{cases} x`=cos\theta \cdotp x +sin\theta \cdot y\\ y`=-sin\theta \cdot x+cos\theta \cdot y \end{cases}\)
\[\begin{bmatrix} x`\\ y` \end{bmatrix} =\begin{bmatrix} cos\theta & sin\theta \\ -sin\theta & cos\theta \end{bmatrix}\begin{bmatrix} x\\ y \end{bmatrix} +\begin{bmatrix} 0\\ 0 \end{bmatrix}\] \[\begin{bmatrix} x`\\ y` \end{bmatrix} =\begin{bmatrix} cos\theta & sin\theta & 0\\ -sin\theta & cos\theta & 0 \end{bmatrix}\begin{bmatrix} x\\ y\\ 1 \end{bmatrix}\]역방향 맵핑(Backward mapping)
\(\begin{align*} \begin{bmatrix} x`\\ y` \end{bmatrix} & =\begin{bmatrix} cos\theta & sin\theta \\ -sin\theta & cos\theta \end{bmatrix}\begin{bmatrix} x\\ y \end{bmatrix}\\ \begin{bmatrix} x\\ y \end{bmatrix} & =\begin{bmatrix} cos\theta & sin\theta \\ -sin\theta & cos\theta \end{bmatrix}^{-1}\begin{bmatrix} x`\\ y` \end{bmatrix}\\ & =\begin{bmatrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{bmatrix}\begin{bmatrix} x`\\ y` \end{bmatrix} \end{align*}\)
getRotationMatrix2D() 함수
2x3 크기의 affine matrix를 생성하는 함수이다. center는 회전에 중심이 되는 원본 영상의 중점을 의미한다(e.g. src.cols/2.f, src/rosw/2.f). angle은 회전할 각도를 입력하며 degree를 기준으로 한다.
영상을 그대로 회전 변환하면 중심축이 좌측 상단이기 때문에 기준점을 중심으로 옮겨 주어야 한다.
\[\begin{align*} \begin{bmatrix} x`\\ y`\\ 1 \end{bmatrix} & =\begin{bmatrix} 1 & 0 & c_{x}\\ 0 & 1 & c_{y}\\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} \alpha & \beta & 0\\ -\beta & \alpha & 0\\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} 1 & 0 & -c_{x}\\ 0 & 1 & -c_{y}\\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \ \begin{cases} \alpha =cos\theta \\ \beta =sin\theta \end{cases}\\ & =\begin{bmatrix} \alpha & \beta & c_{x}\\ -\beta & \alpha & c_{y}\\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} 1 & 0 & -c_{x}\\ 0 & 1 & -c_{y}\\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \ \\ & =\begin{bmatrix} \alpha & \beta & -\alpha c_{x} -\beta c_{y} +c_{x}\\ -\beta & \alpha & \beta c_{x} -\alpha c_{y} +c_{y}\\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \ \end{align*}\]center: 회전 중심 좌표
angle: 회전 각도(반시계 방향)
scale: 회전 후 확대 비율
Mat getRotationMatrix2D(Point2f center, double angle, double scale);
warpAffine() 함수
affine matrix를 원본 영상에 적용해서 반환하는 함수이다.
void warpAffine( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
src: input image.
dst: output image that has the size dsize and the same type as src.
M: [2 x 3] transformation matrix.
dsize: size of the output image.
flags: 보간법을 선택
//! interpolation algorithm
enum InterpolationFlags{
/** nearest neighbor interpolation */
INTER_NEAREST = 0,
/** bilinear interpolation */
INTER_LINEAR = 1,
/** bicubic interpolation */
INTER_CUBIC = 2,
/** resampling using pixel area relation. It may be a preferred method for image decimation, as
it gives moire'-free results. But when the image is zoomed, it is similar to the INTER_NEAREST
method. */
INTER_AREA = 3,
/** Lanczos interpolation over 8x8 neighborhood */
INTER_LANCZOS4 = 4,
/** Bit exact bilinear interpolation */
INTER_LINEAR_EXACT = 5,
/** Bit exact nearest neighbor interpolation. This will produce same results as
the nearest neighbor method in PIL, scikit-image or Matlab. */
INTER_NEAREST_EXACT = 6,
/** mask for interpolation codes */
INTER_MAX = 7,
/** flag, fills all of the destination image pixels. If some of them correspond to outliers in the
source image, they are set to zero */
WARP_FILL_OUTLIERS = 8,
/** flag, inverse transformation
For example, #linearPolar or #logPolar transforms:
- flag is __not__ set: \f$dst( \rho , \phi ) = src(x,y)\f$
- flag is set: \f$dst(x,y) = src( \rho , \phi )\f$
*/
WARP_INVERSE_MAP = 16
};
borderMode: pixel extrapolation method (see #BorderTypes); when borderMode=#BORDER_TRANSPARENT, it means that the pixels in the destination image corresponding to the "outliers" in the source image are not modified by the function.
//! Various border types, image boundaries are denoted with `|`
//! @see borderInterpolate, copyMakeBorder
enum BorderTypes {
BORDER_CONSTANT = 0, //!< `iiiiii|abcdefgh|iiiiiii` with some specified `i`
BORDER_REPLICATE = 1, //!< `aaaaaa|abcdefgh|hhhhhhh`
BORDER_REFLECT = 2, //!< `fedcba|abcdefgh|hgfedcb`
BORDER_WRAP = 3, //!< `cdefgh|abcdefgh|abcdefg`
BORDER_REFLECT_101 = 4, //!< `gfedcb|abcdefgh|gfedcba`
BORDER_TRANSPARENT = 5, //!< `uvwxyz|abcdefgh|ijklmno`
BORDER_REFLECT101 = BORDER_REFLECT_101, //!< same as BORDER_REFLECT_101
BORDER_DEFAULT = BORDER_REFLECT_101, //!< same as BORDER_REFLECT_101
BORDER_ISOLATED = 16 //!< do not look outside of ROI
};
borderValue: value used in case of a constant border; by default, it is 0.
Example code
void on_rotate(int pos, void* data)
{
Mat src = *(Mat*)data;
float degree = (float)pos;
Point2f pt(src.cols / 2.f, src.rows / 2.f);
Mat rot = getRotationMatrix2D(pt, degree, 1.0);
Mat dst;
warpAffine(src, dst, rot, Size());
imshow("dst", dst);
}
void ex_processing(){
Mat src = imread("../data/rose.bmp");
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
imshow("src", src);
namedWindow("dst");
createTrackbar("angle", "dst", 0, 360, on_rotate, (void*)&src);
on_rotate(0, (void*)&src);
waitKey();
}
기하학적 변환
void flip(InputArray src, OutputArray dst, int flipCode);
src: input array.
dst: output array of the same size and type as src.
flipCode: a flag to specify how to flip the array; 0 means
flipping around the x-axis and positive value (for example, 1) means
flipping around y-axis. Negative value (for example, -1) means flipping around both axes.
1: 좌우 대칭
0: 상하 대칭
-1: 좌우 상하 대칭
void ex_processing(){
Mat src = imread("../data/rose.bmp"), dst;
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
flip(src, dst, 1);
imshow("src", src);
imshow("dst", dst);
waitKey();
}
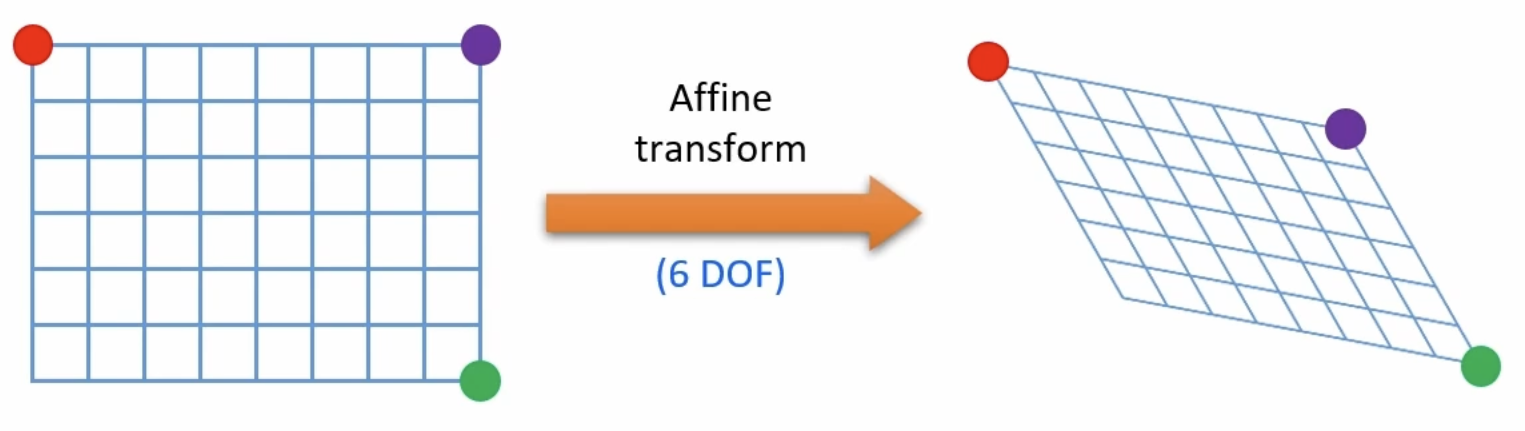
어파인 변환(Affine transform)
Affine transform 같은 경우 평행사변형 형태로 변환하기 때문에 3개의 점의 변환 정보만 알아도 나머지 1개는 3개의 점으로 구할 수 있다. 빨간색 점을 좌표 편면상의 한 점의 이동이라고 봤을 때, x와 y에 대한 두 식으로 표현이 가능하다. 나머지 두 점 또한 4개의 식으로 표현이 가능하기 때문에 총 6개의 식으로 위 변환을 정의할 수 있다.
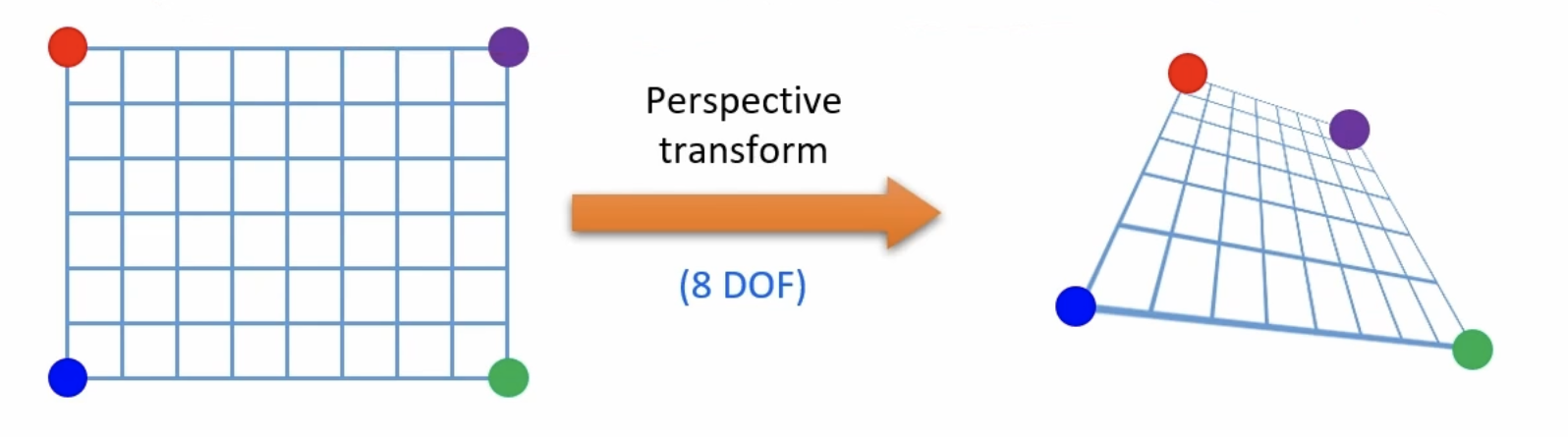
투시 변환(Perspective tranform)
Perspectiva transform은 8개의 방정식으로 정의가 가능하며, 이를 통한 affine matrix를 구할 수 있다.
\(\begin{aligned} \begin{bmatrix} wx`\\ wy`\\ w \end{bmatrix} & =\begin{bmatrix} a & b & c\\ d & e & f\\ g & h & i \end{bmatrix}\begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \ \ \end{aligned}\) \(\begin{cases} x` & =\frac{ax+by+c}{gx+hy+i}\\ y` & =\frac{dx+ey+f}{gx+hy+i} \end{cases}\) \(\begin{cases} x` & =ax+by+c-gxx`-hx`y\\ y` & =dx+ey+f-gxy`-yy` \end{cases}\) \(\begin{cases} x_{1}^{`} & =ax_{1} +by_{1} +c & & -gx_{1} x_{1}^{`} -hx_{1} y_{1}^{`}\\ y_{1}^{`} & = & dx_{1} +ey_{1} +f & -gx_{1} y_{1}^{`} -hy_{1} y_{1}^{`} \end{cases}\) \(\begin{bmatrix} x_{1}^{`}\\ y_{1}^{`}\\ x_{2}^{`}\\ y_{2}^{`}\\ x_{3}^{`}\\ y_{3}^{`}\\ x_{4}^{`}\\ y_{4}^{`} \end{bmatrix} =\begin{bmatrix} x_{1} & y_{1} & 1 & 0 & 0 & 0 & -x_{1} x_{1}^{`} & -x_{1}^{`} y_{1}\\ 0 & 0 & 0 & x_{1} & y_{1} & 1 & -x_{1} y_{1}^{`} & -y_{1} y_{1}^{`}\\ x_{2} & y_{2} & 1 & 0 & 0 & 0 & -x_{2} x_{2}^{`} & -x_{2}^{`} y_{2}\\ 0 & 0 & 0 & x_{2} & y_{2} & 1 & -x_{2} y_{2}^{`} & -y_{2} y_{2}^{`}\\ x_{3} & y_{3} & 1 & 0 & 0 & 0 & -x_{3} x_{3}^{`} & -x_{3}^{`} y_{3}\\ 0 & 0 & 0 & x_{3} & y_{3} & 1 & -x_{3} y_{3}^{`} & -y_{3} y_{3}^{`}\\ x_{4} & y_{4} & 1 & 0 & 0 & 0 & -x_{4} x_{4}^{`} & -x_{4}^{`} y_{4}\\ 0 & 0 & 0 & x_{4} & y_{4} & 1 & -x_{4} y_{4}^{`} & -y_{4} y_{4}^{`} \end{bmatrix}\begin{bmatrix} a\\ b\\ c\\ d\\ e\\ f\\ g\\ h \end{bmatrix}\)
Mat getPerspectiveTransform(InputArray src, InputArray dst, int solveMethod = DECOMP_LU);
src: Coordinates of quadrangle vertices in the source image.
dst: Coordinates of the corresponding quadrangle vertices in the destination image.
solveMethod: method passed to cv::solve (#DecompTypes)
void warpPerspective( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
src: input image.
dst: output image that has the size dsize and the same type as src .
M: \f$3\times 3\f$ transformation matrix.
dsize: size of the output image.
flags: combination of interpolation methods (#INTER_LINEAR or #INTER_NEAREST) and the
optional flag #WARP_INVERSE_MAP, that sets M as the inverse transformation (
\f$\texttt{dst}\rightarrow\texttt{src}\f$ ).
borderMode: pixel extrapolation method (#BORDER_CONSTANT or #BORDER_REPLICATE).
borderValue: value used in case of a constant border; by default, it equals 0.
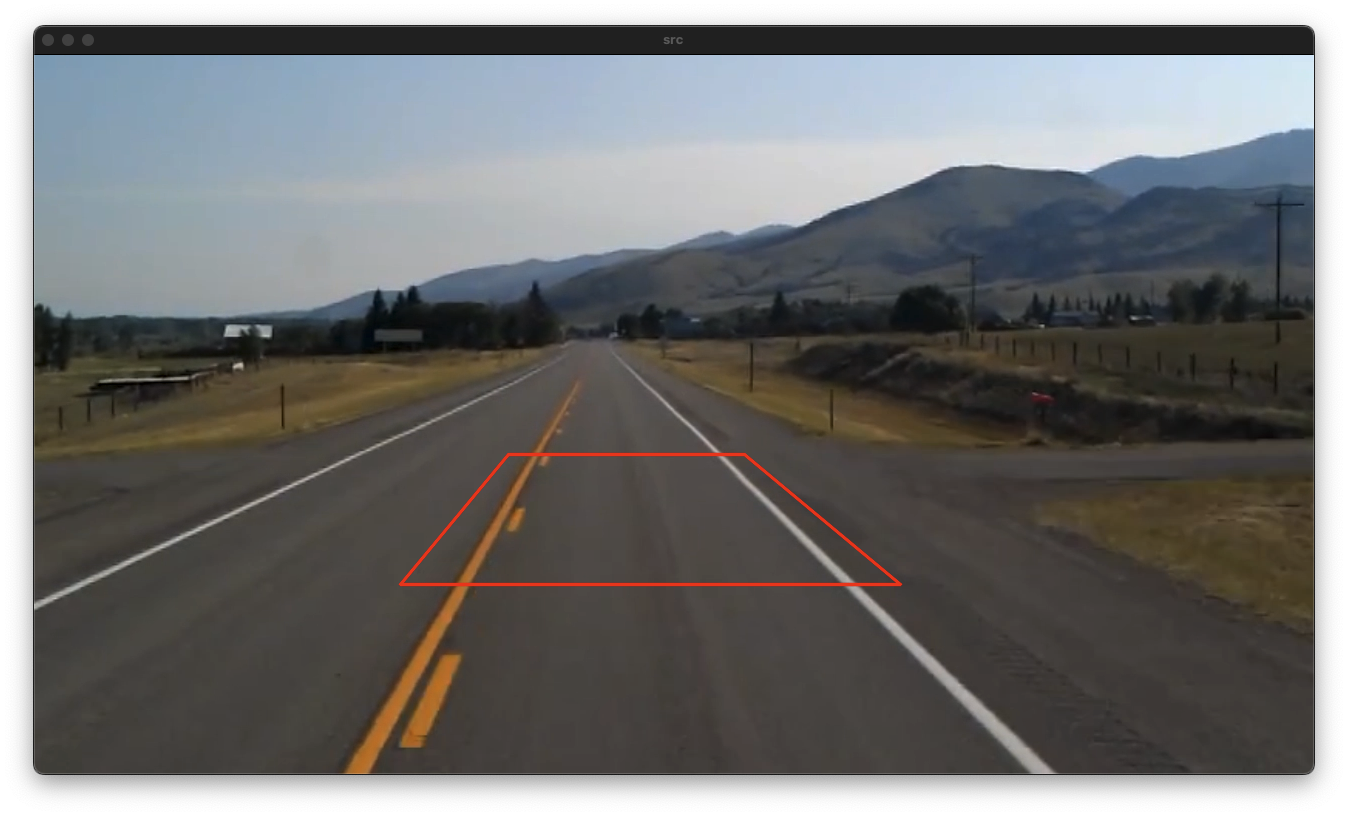
void ex_processing(){
VideoCapture cap("../data/test_video.mp4");
if (!cap.isOpened()) {
cerr << "Video load failed!" << endl;
return ;
}
Mat src;
while (true) {
cap >> src;
if (src.empty())
break;
int w = 500, h = 260;
vector<Point2f> src_pts(4);
vector<Point2f> dst_pts(4);
src_pts[0] = Point2f(474, 400); src_pts[1] = Point2f(710, 400);
src_pts[2] = Point2f(866, 530); src_pts[3] = Point2f(366, 530);
dst_pts[0] = Point2f(0, 0); dst_pts[1] = Point2f(w - 1, 0);
dst_pts[2] = Point2f(w - 1, h - 1); dst_pts[3] = Point2f(0, h - 1);
Mat per_mat = getPerspectiveTransform(src_pts, dst_pts);
Mat dst;
warpPerspective(src, dst, per_mat, Size(w, h));
vector<Point> pts;
for (auto pt : src_pts) {
pts.push_back(Point(pt.x, pt.y));
}
polylines(src, pts, true, Scalar(0, 0, 255), 2, LINE_AA);
imshow("src", src);
imshow("dst", dst);
if (waitKey(1) == 27)
break;
}
}
리맵핑(Remapping)
영상의 특정 위치 픽셀을 다른 위치에 재배치하는 일반적인 방법이다.
\[\begin{cases} x & :\ input\\ x` & :\ output \end{cases} \Longrightarrow \begin{cases} x` & =x+200\\ y` & =y+100 \end{cases} \Longrightarrow \begin{cases} x & =x`-200\\ y & =y`-100 \end{cases}\] \[\begin{array}{l} 이동\ 변환:\ \begin{cases} map_{x}( x,y) & =x-200\\ map_{y}( x,y) & =y-100 \end{cases}\\ \\ 상하\ 대칭:\ \begin{cases} map_{x}( x,y) & =x\\ map_{y}( x,y) & =h-1-y \end{cases}\\ \\ 크기\ 변환:\ \begin{cases} map_{x}( x,y) & =x/2\\ map_{y}( x,y) & =y/2 \end{cases} \end{array}\]void ex_processing(){
Mat src = imread("../data/lenna.bmp");
if (src.empty()) {
cerr << "Image load failed!" << endl;
return ;
}
int w = src.cols;
int h = src.rows;
Mat map1 = Mat::zeros(h*2, w*2, CV_32FC1);
Mat map2 = Mat::zeros(h*2, w*2, CV_32FC1);
for (int y = 0; y < h*2; y++) {
for (int x = 0; x < w*2; x++) {
map1.at<float>(y, x) = (float)x/2;
map2.at<float>(y, x) = (float)y;
//map2.at<float>(y, x) = (float)h - 1 - y;
//map2.at<float>(y, x) = (float)y/2;
}
}
Mat dst;
remap(src, dst, map1, map2, INTER_LINEAR);
//remap(src, dst, map1, map2, INTER_LINEAR, BORDER_DEFAULT);
imshow("src", src);
imshow("dst", dst);
waitKey();
}